Directed Machines runs on the Demeter Control Platform (DCP), our software stack that deals with complex environments using minimal resources. Composable services that can be easily deployed, monitored, and securely operated, driving both autonomy behaviors when executing in robots, or advanced analytics when running in the cloud. The hard, but boring problems of self update, secure access, telemetry ingestion and analysis were solved first, which enabled a very small team to make rapid progress on deploying autonomous machines that safely do heavy work, day or night, across multiple states.
The same runtime that powers the robots also runs our telemetry processing in the cloud, across a replicated cluster, and is able to handle millions of telemetry packets per day with just 3 nodes on free-tier virtual machines.
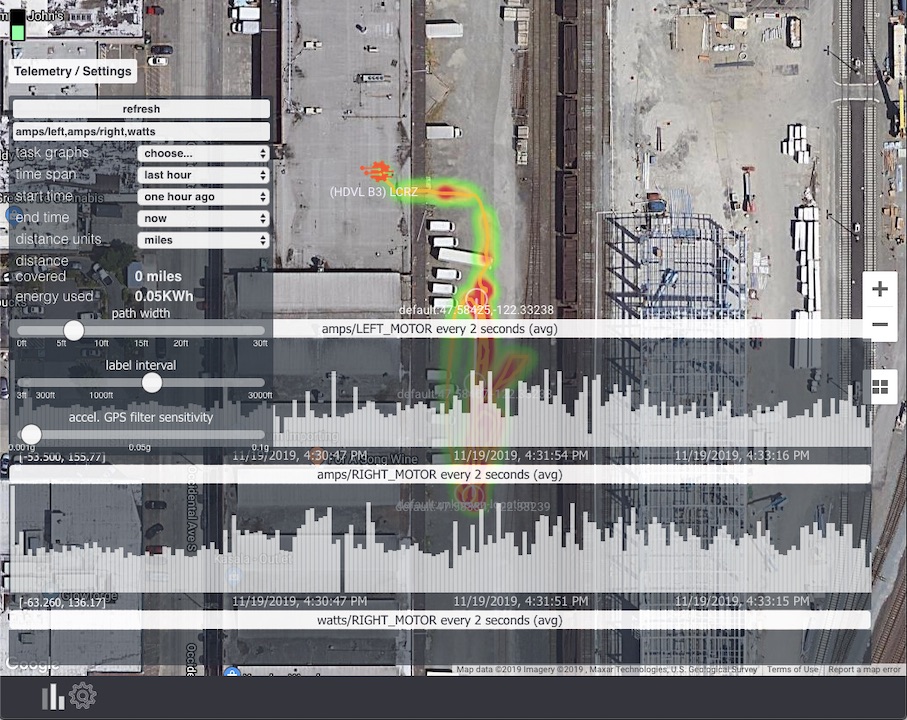
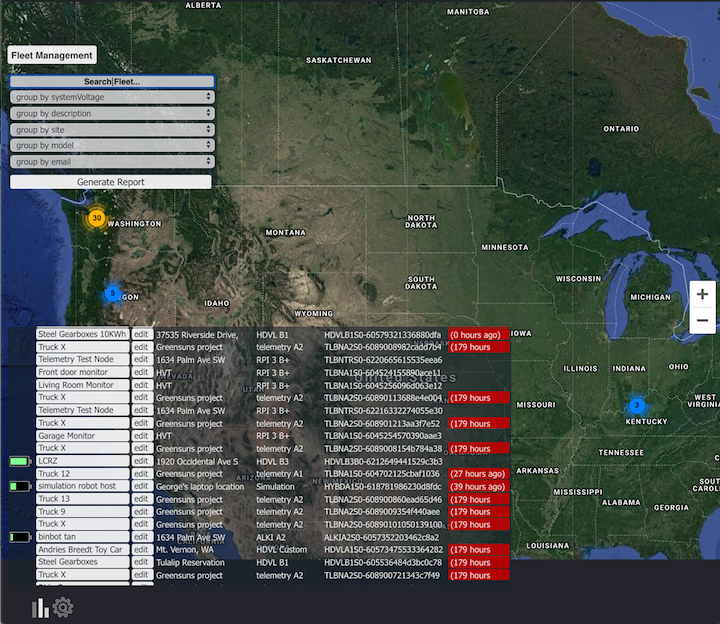
Data replication and peer monitoring enables cooperating robots to take over work from a failed peer. The integrated index engine supports high ingestion rates for telemetry data and supports complex real time queries across time and space. Cloud nodes offer fleet management with reports, visualization of tasks performed, and efficiency analysis.
The Demeter Control Platform enables cooperation and coordination of actions between hardware control services and planners. The inputs from the minimal (and low cost) sensors are conditioned and propagated through cooperating planners, with decisions made at the proper level, with and without feedback loops.
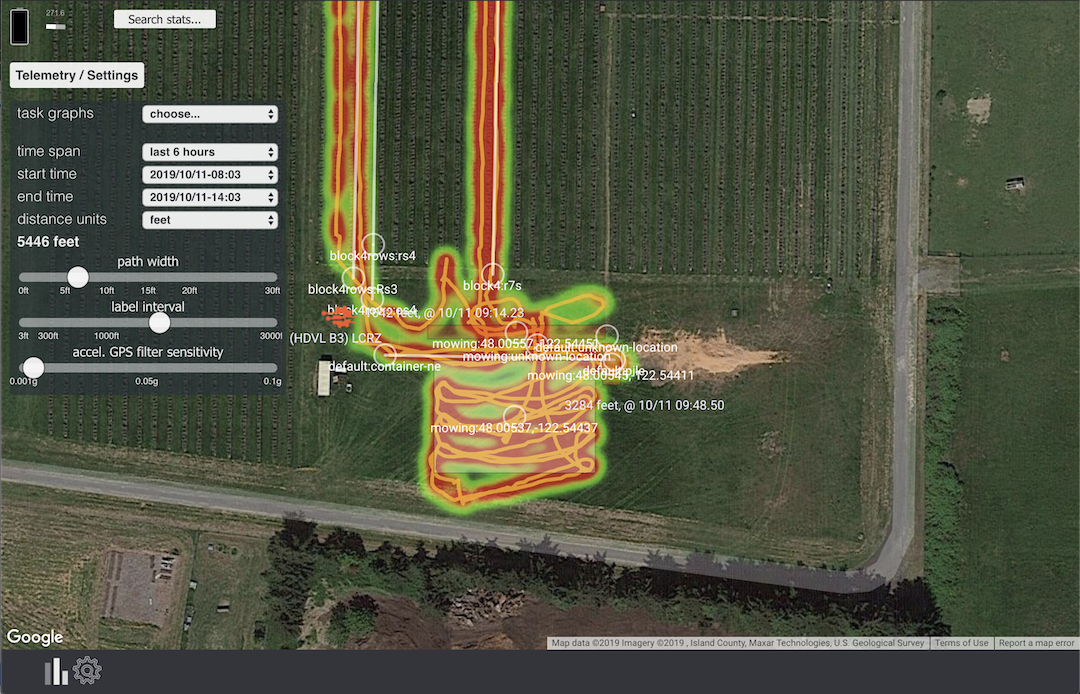
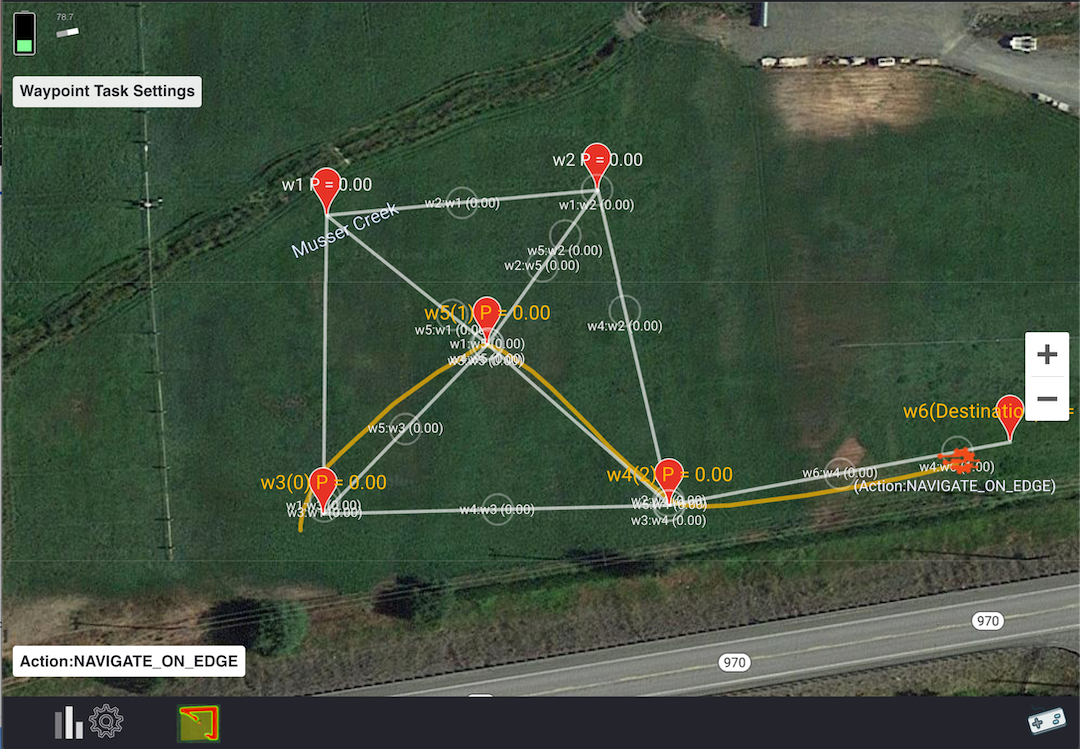
In contrast with deep learning approaches that require massive, carefully curated data sets, we use a probabilistic topological model bootstrapped by the operator/user: A guided tour of the property or a simple connected graph of locations. The dynamics of the robot motion through this graph are modeled through transition probabilities, with every attempt improving performance.
The end result is robust planning that deals with dynamic, noisy environments. Users that require advanced precision can use our vision localization tags and / or differential GPS sensors for a small additional cost.
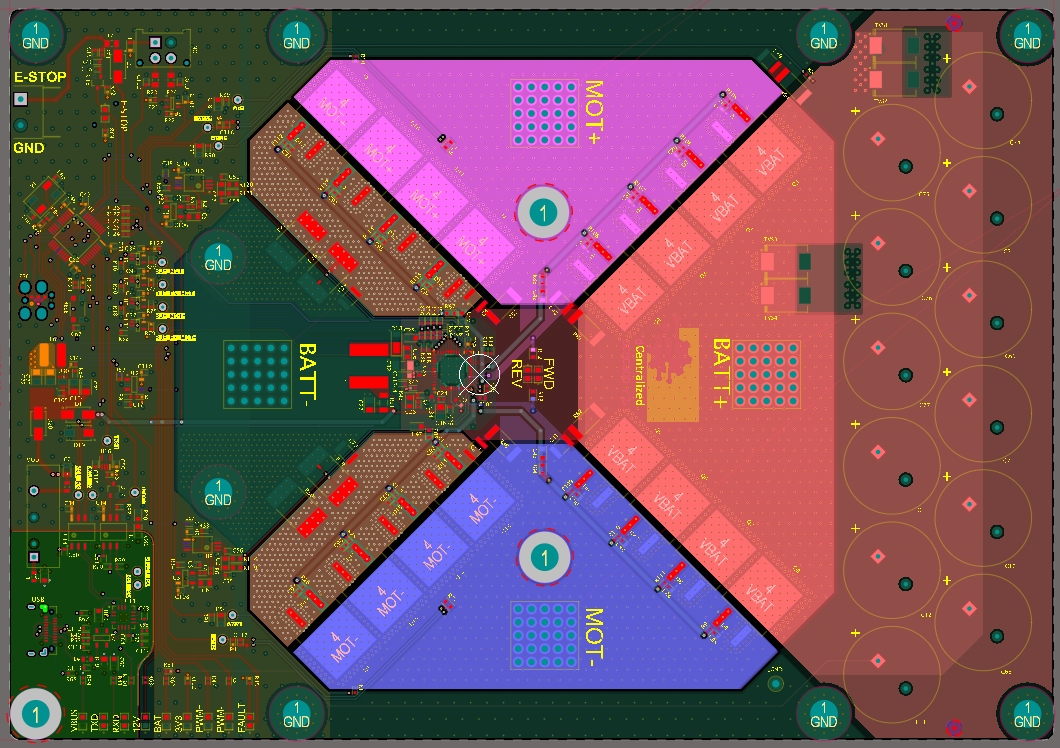
We designed and produced a high power motor control board because there was nothing available that dealt with the high current, brutal duty cycle, outdoor environment and cost constraints. Our custom 300A @ 48V motor control board has everything we need to safely run the machine at a range of performance profiles, re-used for both the drive units and our first-of-its-kind electric PTO.
Fewer moving parts and no consumables (oil, fuel), makes maintenance simpler and field repair possible with a modular, accessible design for all key electronic and drive train parts
We use 4D lead-acid batteries, at 1/5th the cost of lithium-ion batteries. We take advantage of the increased weight to put all that torque to the ground. This mature battery technology also has a 98% recycling rate.
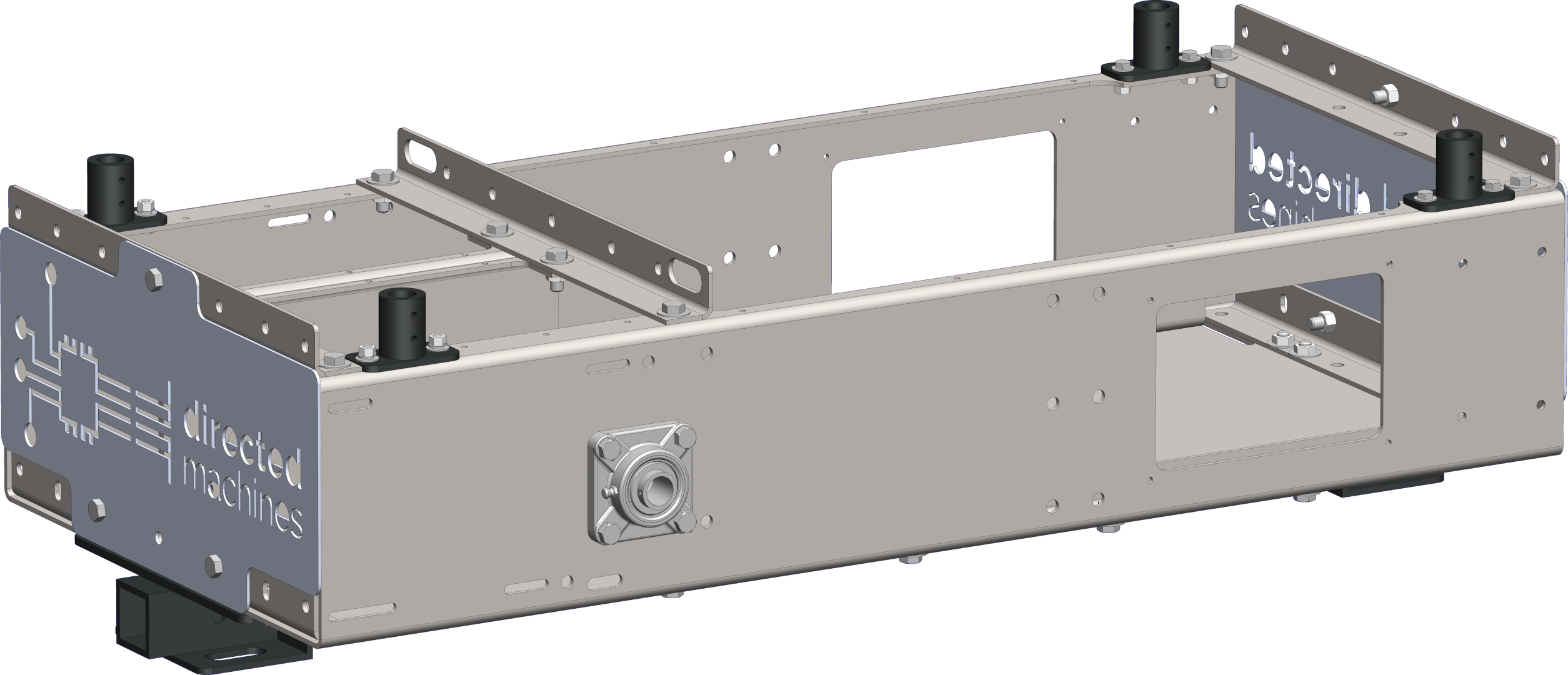
Our steel frame uses a minimal number of parts, with a single bent steel plate providing a strong, easy to make, chassis. The robot is 90% recyclable by weight and we avoid waste by planning components around our manufacturing capability. We minimize tedious labor in the manufacturing process just like we eliminate it from land care tasks.
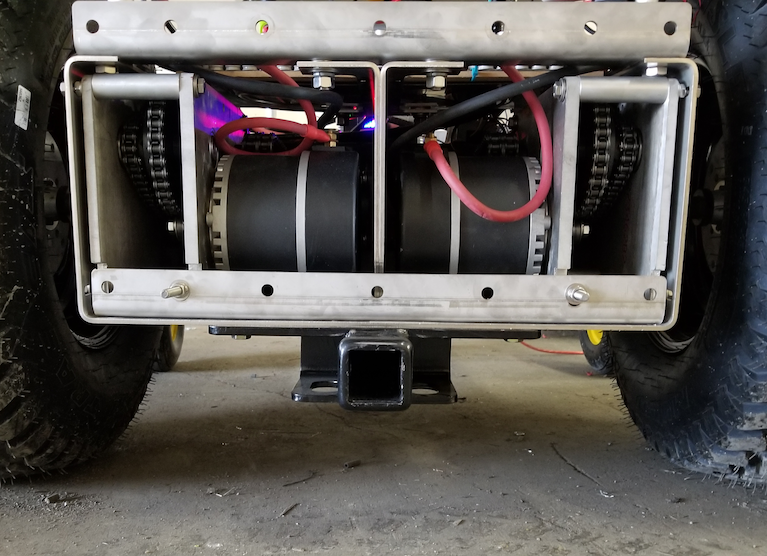
Our chain drive reduction went through multiple iterations until we had a low cost but robust chain drive unit that can be field replaced or repaired with easy to source parts. Two drive units power our zero turn machine, which can deal with challenging terrain, with implements attached on either end.
The PMDC electric motors are coupled with our reductions to produce over 1400 lb.ft of torque across most of the RPM range, with a top speed of 10MPH.
All this torque results in the ability to do heavy work: The robot can carry up to 4000 lbs directly on its chassis or pull over 7000 lbs.
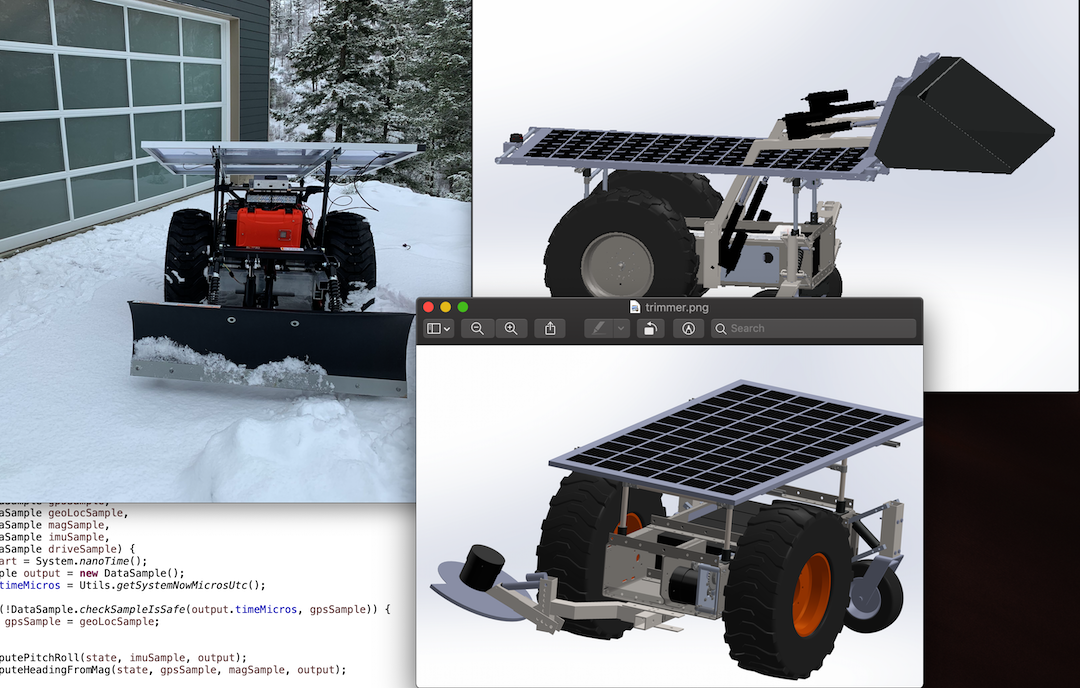
We are hard at work developing custom implements for our machines that further increase our versatility and further our mission for pollution and chemical free land care.
Our laser weeding prototype has evolved from being a small standalone robot, to a custom implement that can be pulled behind the robot, with dual laser heads and down facing cameras selecting and zapping weeds.
We started snow management trials last winter and plan to continue, testing various snow plow attachments and snow blowers with our device.
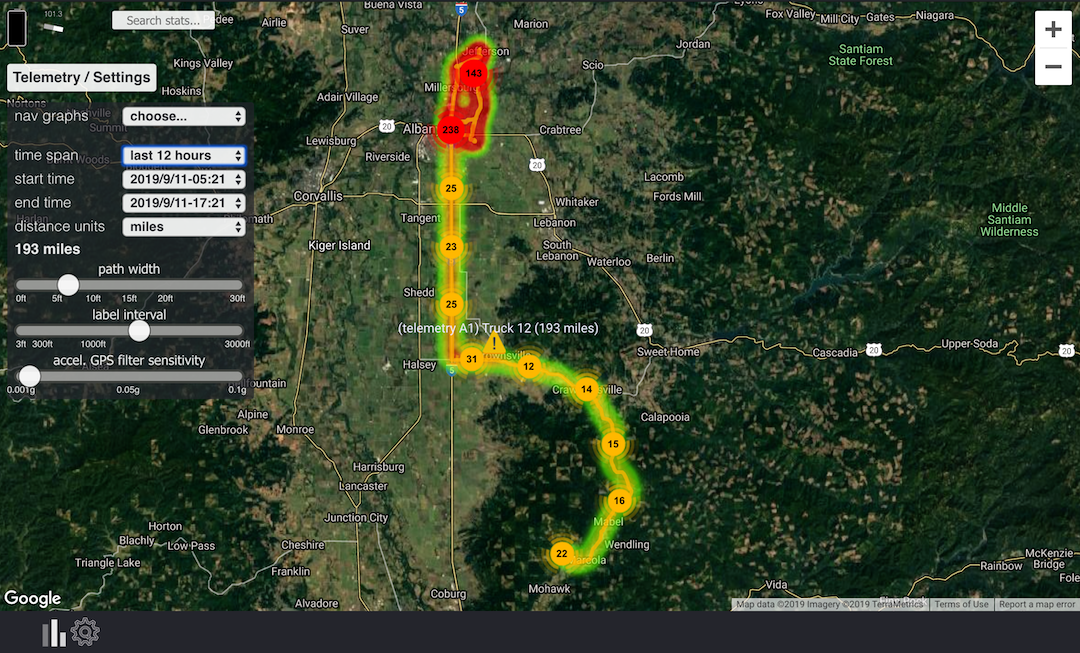
In addition, we have started trials of our asset tracking service, re-using the robot "brain" and the same telemetry processing and fleet management stack to offer a construction equipment solution that is currently deployed across a fleet of trucks and earth moving equipment.